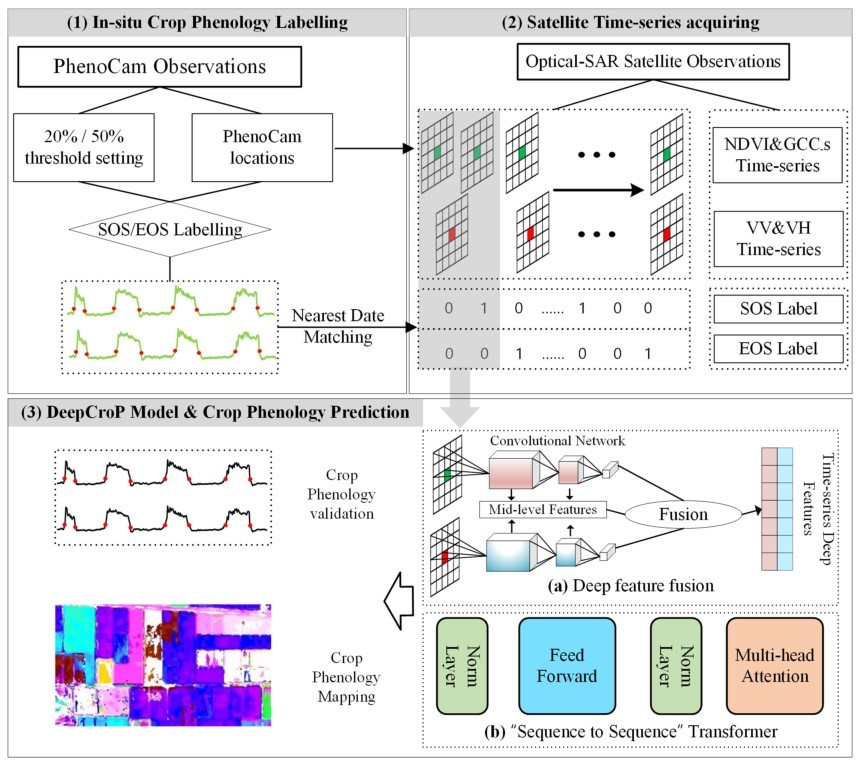
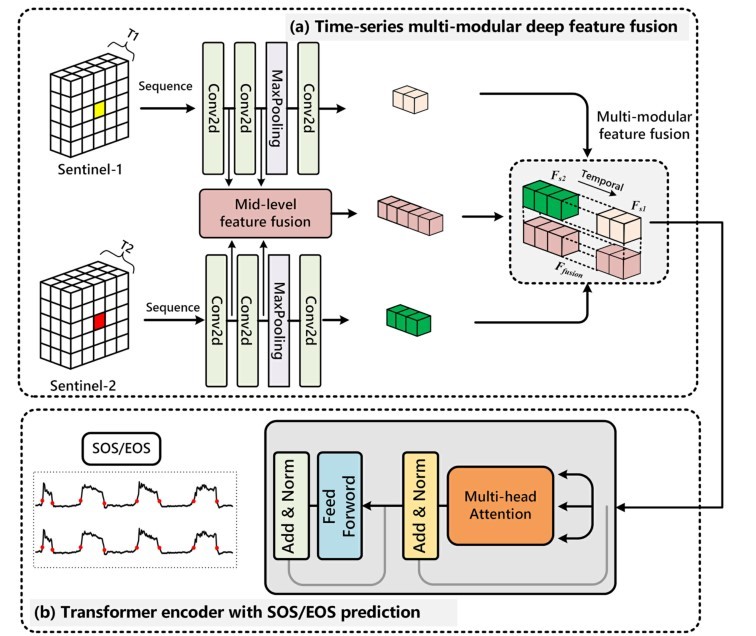
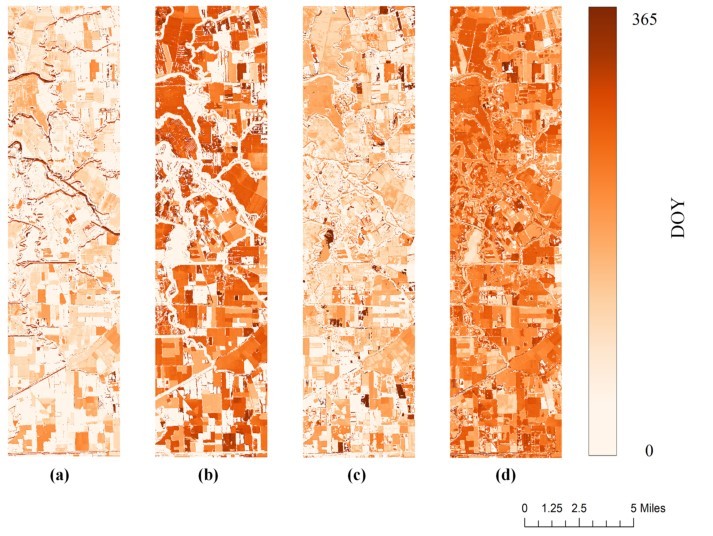
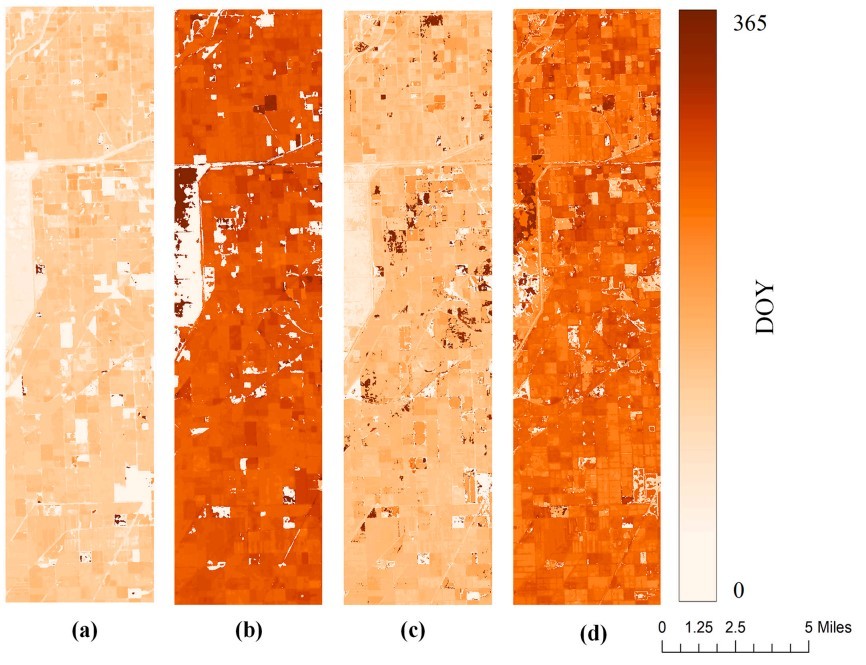
作者:赵文智、屈炀、张立强、李凯源 作物物候参数是作物动态监测的关键指标,准确的作物物候信息探测对于精准农业、作物产量估算以及农业生产力水平的提高至关重要。在这种情况下迫切需要高效的作物物候信息提取方法。传统的作物物候学信息提取是通过训练有素的人员频繁观察来记录特定变化事件的时间。另一种则是使用具有高时间分辨率的固定位置数字相机,该相机每天多次重复捕捉给定区域的物候信息。遥感技术具有监测规模大、成本低、重访周期短的优点,它为作物动态监测提供了一种具有成本效益和可靠性的方法。其中多时相遥感数据可用于推导植被生长动力学的物候学描述符,称为地表物候学(LSP)。传统上,基于遥感数据的物候学研究主要依赖于中到粗分辨率的光学图像,包括AVHRR和MODIS等。这些中等分辨率的传感器可以有效地捕捉大规模甚至全局的LSP参数,但具有复杂背景的低空间分辨率混合麦田可能无法正确地代表实际的作物表型。同时,新一代地球观测卫星提供了更高空间分辨率、更短重访间隔的图像,如哨兵2号卫星,这引发了对精细尺度作物物候学测绘的进一步研究。现在,可以从更精细的卫星数据中解析单个农田地块,并估计特定作物的物候信息。然而,一些研究表明,数码相机估计的物候学参数与卫星观测到的参数有很大不同,其主要原因是由于卫星和现场摄像机之间的观看频率和观看覆盖面积的差异,如何有效耦合地面观测与遥感卫星数据实现高精度的物候探测仍是一个亟待解决的问题。 在此基础上,本文通过整合光学和合成孔径雷达数据,以提高作物物候学参数提取的准确性。具体而言,我们将合成孔径雷达和光学卫星观测相结合,在地面观测的帮助下,引入额外的植被结构信息,创建用于作物物候参数识别的空间感知深度学习模型,克服两者之间的视角和观测范围的不一致性,如图1所示。 图1 标定过程的总体框架,其中(1) 使用PhenoCam时间序列进行SOS/EOS标记;(2) 获取卫星时间序列图像并进行空间块提取;(3) 训练DeepCroP模型并进行作物物候映射。 图2展示了Deep-CroP模型架构的可视化表示。该模型以S1和S2卫星图像作为输入,并将其输入到两个流中。然后, 该模型从SAR和光学时间序列图像中分别提取特征,并通过一个精心设计的多层融合模块将空间-时间特征拼接在一起。最后,通过多头注意力模块识别物候参数。 图2 Deep-CroP模型的流程图 为了探究实验方案及模型的有效性,我们在美国选取了两块约40km×10km的范围作为研究的试验区。其中实验数据涉及欧空局的S1与S2时序数据,美国的CDL农田分类数据以及PhenoCam物候站点(一共60个站点)的时序数据(其中,选择了5个作为测试点对模型的性能进行定量分析),最终得到的物候制图结果为图3与图4所示。 图 3 基于Deep-CroP模型在研究区一上的作物物候学映射,包括(a) SOS20,(b) EOS20,(c) SOS50和(d) EOS50。 图 4 基于Deep-CroP模型在研究区二上的作物物候学映射,包括(a) SOS20,(b) EOS20,(c) SOS50和(d) EOS50 在测试站点上的结果显示,我们提出的方法可以准确地识别作物的物候阶段,并与物候相机所提取的物候时间点达到高度的一致性。总体上,光学和SAR时间序列的深度融合大大提高了卫星和物候相机的观测一致性,这有望帮助改进现有的作物监测系统。 上述研究成果发表在遥感领域国际权威杂志《Remote Sensing of Environment》: Zhao, W., Qu, Y., Zhang, L., & Li, K. (2022). Spatial-aware SAR-optical time-series deep integration for crop phenology tracking. Remote Sensing of Environment, 276, 113046. (IF=13.850,JCR一区,中科院一区top)。 全文链接:https://doi.org/10.1016/j.rse.2022.113046.